
- 解決方案一
- 解決方案二
- 解決方案三
-
EV100在塔吊回轉控制中的應用
■ 引言
現在,我國的建筑用塔式起重機已越來越普遍,從普通的多層建筑、房地產工程、高層建筑到大型的鐵路工程、橋梁工程、電力工程、水利工程,到處都有塔機的應用。計算機輔助設計、微電子技術、程控語言控制技術都在塔機上得到了應用。其中啟升機構、回轉機構、小車變幅機構的控制發展趨勢是采用變頻器控制。
回轉機構的特點是具有較大的慣性沖擊,啟動過快沖擊大,停車和打反轉都不允許過快過急,否則不僅運轉不平穩,還會損壞機構。較好的解決辦法是采用變頻調速使起制動平穩。并且采用變頻器控制以后使系統控制更為簡單,控制系統具有多重保護,使系統更加安全可靠。
■ 塔吊變頻控制方案一、塔吊回轉變頻控制原理
山西工程機械廠是一家專業生產建筑起重機(俗稱:塔吊)的廠家,以前使用通用型變頻器(V/F控制),由于機器低頻轉矩太小,造成啟動過程旋轉臂抖動厲害。
現改用南京歐陸EV100-4kw(帶6極3kW三相異步電動機)高性能矢量變頻器,能很好地解決上述問題。電氣接線圖如下:

改造時,起初沒加制動電阻,停車時旋轉臂前進角度太大(40Hz,吊了1噸重物),啟動過程旋轉臂偶爾出現抖動,主要因為啟動時輸出力矩不夠(電機在啟動過程出現停車現象);而停不下來時,塔吊司機習慣打反轉,變頻器經常跳OU2。
后來加上2倍標準(功率)的制動電阻,經優化變頻器停車參數后,停車時,因為慣性,旋轉臂前進角度不到20度(40Hz,吊了1噸重物),已經達到建筑起重機國標標準。
通過更改加減速時間,提升啟動轉矩和啟動頻率,電動機從未出現過停車和抖動等現象。
二、變頻器主要功能碼設置
P0.01 1 端子指令通道;
P0.07 5 多段速運行設定;
P0.11 7.0 加速時間;
P0.12 15 減速時間;
P1.01 4.0 直接啟動開始頻率;
P1.02 0.1 啟動頻率保持時間;
P1.05 1 加減速方式為S曲線型;
P1.06 1 自由停機;
P3.00 30 速度環比例增益;
P5.00 1 HDI為開關量輸入;
P5.01 1 S1端子為正轉運行;
P5.02 2 S2端子為反轉運行;
P5.03 16 多段速端子1;
P5.04 17 多段速端子2;
P5.05 18 多段速端子3;
P5.08 7 HDI端子故障復位;
P8.16 3 故障自動復位3次;
PA.04 60.0 低速段;
PA.06 80.0 中速段;
PA.10 100.0 高速段;
其他詳情參見《EV100系列矢量變頻器說明書》。
■ 總結
由于塔吊回轉機構具有較大的慣性沖擊,啟動過快沖擊大,如果停車和打反轉過快過急,將使系統運轉不平穩,甚至停機,還會損壞機構。因此,選用力矩特性優越的EV100矢量變頻器,選配較大功率的制動電阻,并設定合適的加減速時間和啟停方式等才能克服上述問題。
-
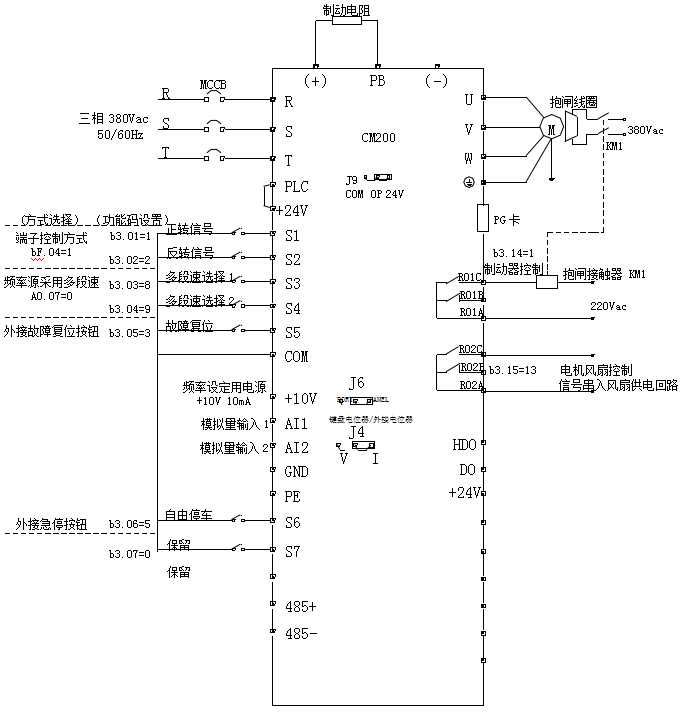
CM200系列起重專用變頻器案列
一、負載特點:
橋式行車起重機啟動頻繁,定位要求高,因此停機剎車制動要好(一般變頻器在給出剎車信號時抱閘聲過大且抖動),一般由橋架運行機構、電動葫蘆、橋架金屬結構和電氣系統組成。電動葫蘆作為橋式行車起重機的起升機構,并沿主梁運行。橋式行車起重機起升機構包括制動器、電動機、減速機、卷筒和滑輪組。電動機通過減速機,帶動卷筒轉動,使鋼絲繩繞在卷筒或從卷筒放下,以升降重物,中、小型橋式行車起重機較多采用制動器、減速機和電動機組合成一體的“三合一”驅動方式,大起重量的普通橋式行車起重機為便于安裝和調整,驅動裝置常采用萬向聯軸器。
二、對變頻器應用要求:
1、低頻時能保證恒轉矩輸出,以免低頻滿負載情況下帶不動負載。
2、過載能力強、可靠性高,滿負載時空中停車或再提升時不產生溜鉤現象。
3、抱閘時要求平緩、無明顯抖動。
首次設定需輸入正確密碼按JOG鍵01430


三、調試指南:
序號
參數功能碼
出廠默認值
調試設定值
功能說明
1
A0.01:
機型確定
對應電機名牌上設定
電機額定功率
2
A0.02
機型確定
電機額定電壓
3
A0.03
機型確定
電機額定電流
4
A0.04
機型確定
電機額定頻率
5
A0.05
機型確定
電機額定轉速
6
A0.08
0
0
起重機構類型
7
b0.04
0
3
電機自學習模式
8
b3.01
1
1
S1選擇“正向運行
9
b3.02
2
2
S2選擇“反向運行
10
b3.03
8
8
S3選擇“多段速選擇1
11
b3.14
1
1
繼電器RO1A-RO1C選擇制動器控制功能
12
A0.07
0
0
頻率源;多段速給定
13
b5.00
5HZ
用戶設定
一段速度
14
b5.01
20HZ
用戶設定
二段速度
四、注意事項:
1、提升電機一般采用矢量模式控制,變頻器以“矢量控制” (b1.00=0 或 1) 模式運行時,對準確的電機參數依賴性很強所以要求電機自學習后在帶載2、左右行走電機一般采用多段速,減速停機方式
基本配線圖
-
EV510A-XX-T4/QZ系列起重專用變頻器應用案例
一、 應用要求
單梁行車,一般使用錐形電機,自帶抱閘,低頻時由于電壓低會出現抱閘無法打開或者溜鉤現象,因此對變頻器低頻帶載能力要求比較高。雙梁行車,外接抱閘信號,在松抱閘頻率要求比較低時,也對變頻器低頻帶載能力有要求。同時雙梁起重由變頻器控制板發出松抱閘信號,因此,松抱閘信號的時序邏輯要求正確可靠,在出現任何意外情況如變頻器故障,電源電壓降低,電機、變頻器過載等時都能夠及時抱閘。行車需要多段速運行,要求變頻器有足夠多的控制端子。
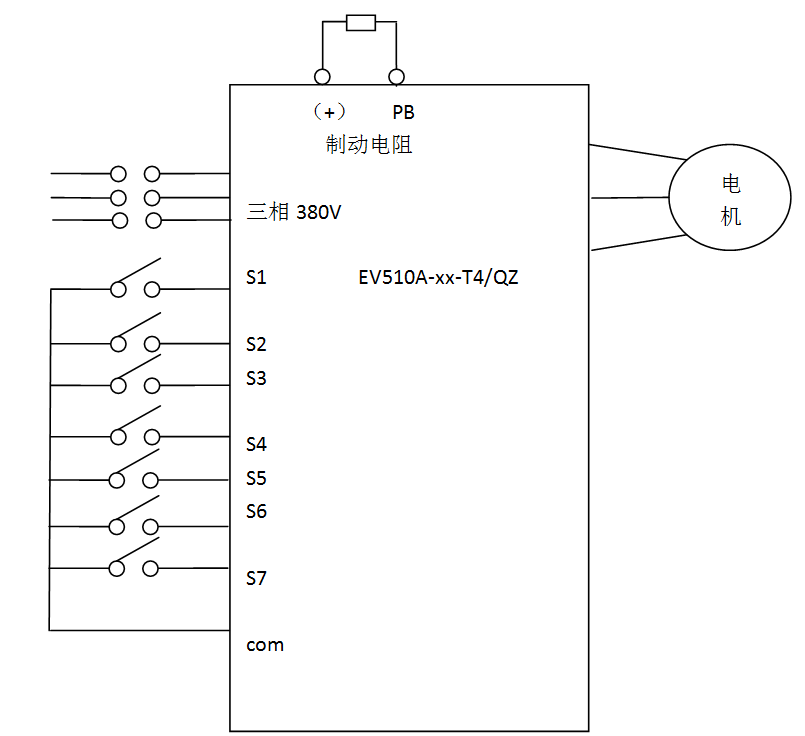
二、 現場應用

三、調試指南
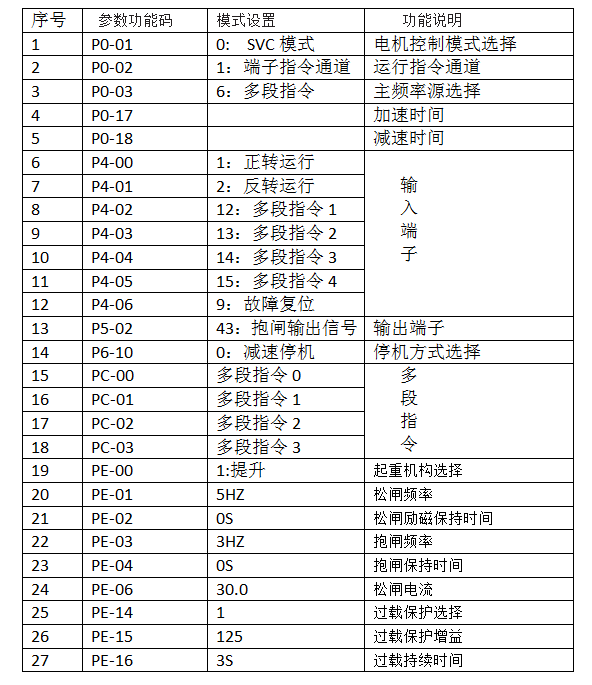
調試說明:
1、提升默認SVC模式
2、端子指令,多段速控制,每段具體根據客戶需求設置
3、雙梁外加抱閘信號時繼電器輸出功能選擇43
4、松閘如果有溜鉤現象,可以適當調高松閘頻率,并加一些勵磁時間如0.5秒
5、在負載較重時,抱閘如果有溜鉤現象,可以適當調高抱閘頻率,使電機在有足夠力矩的情況下抱閘
6、使能過載保護時,如果過載運行超過過載時間,則進入過載保護,過載保護狀態下,只能下行運行,不可以提升運行
7、采用無感矢量控制,低頻力矩較V/F控制大,但是無感矢量對電機參數依賴比V/F強,因此,采用無感矢量時最好先進行自學習。在某些特殊場合,如果采用無感矢量容易報過流限流故障,可嘗試采用V/F控制。
